QA01
QA01
目标任务要求不够详细,不知道是什么
参考QQ群文件的“中国飞行器设计创新大赛规则(2023年).pdf ->固定翼无人机侦察与打击 ->5.竞赛方法”
5.6 A、B 两个机组同时上场。比赛计时指令发出时,由参赛选手开启计时器,然后携带任务箱从出发线行进至操纵区,完成组装、调试和起飞。飞行器携带模拟弹飞离起降区即为起飞成功。
- 在比赛开始后需完成飞行器飞控部分的启动,按照去年的说法就是:打开电脑、启动图传、运行比赛程序、在程序中看到飞行器状态ok后告诉队友,准备起飞。
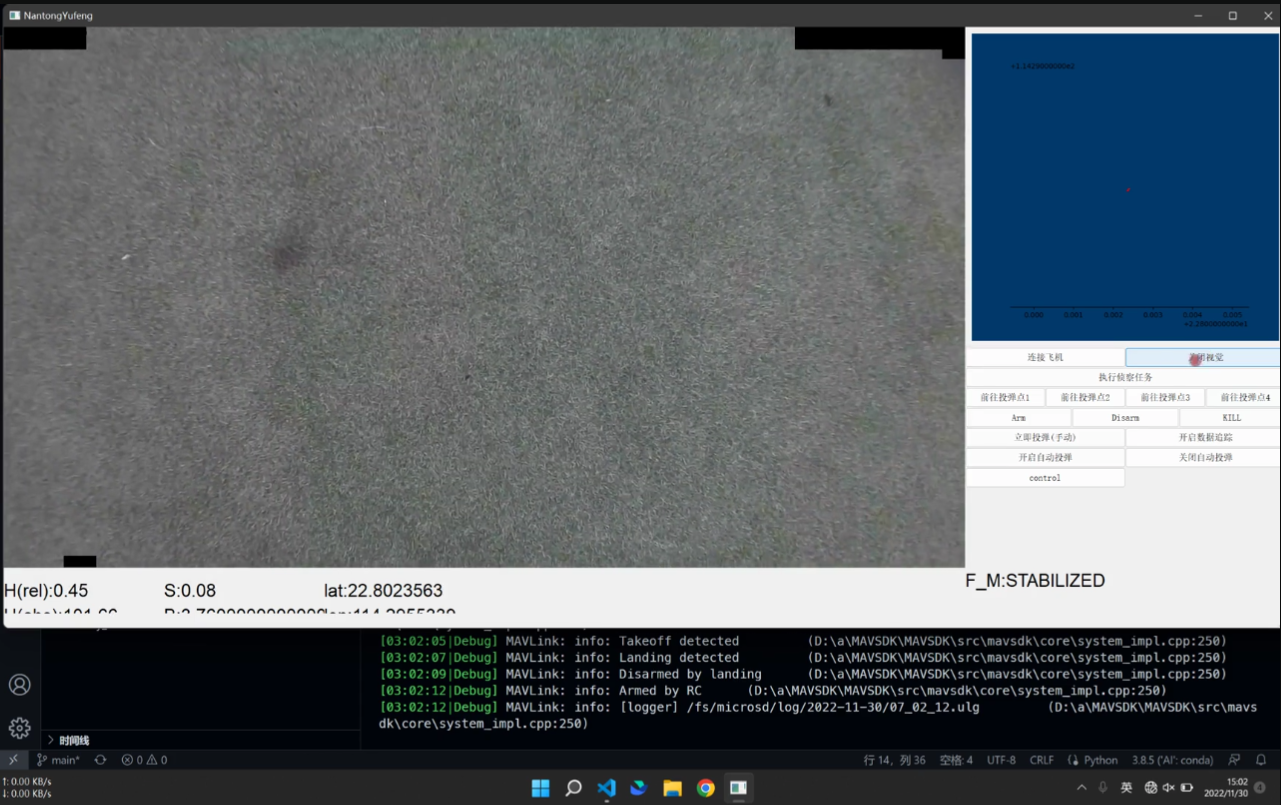
图片来源:https://www.hanhan3344.top/ 顶栏→2022CADC_录屏 && 图传资料→录屏文件夹→Desktop 2022.11.30 - 15.01.28.02.mp4
5.7 参赛选手可自由选择自动或手动的方式起飞。若选择自动方式起飞,须在飞行器起飞前将遥控器置于地面;若选择手动方式起飞,须在飞行器进入目标区之前将遥控器置于地面,以确认自主飞行切换成功。
- 今年新增的加分项目,自动起飞,可以参考PX4 User Guide中的takeoff部分https://docs.px4.io/main/en/flight_modes/takeoff.html#fixed-wing-fw
5.8 飞行器执行侦察和打击任务时必须为自主飞行状态。侦察任务为 A 机组识别红色天井中的数字,B 机组识别蓝色天井中的数字。完成侦察后,对“中位数”所在的天井进行打击,打击结果以模拟弹第一落点为准。
-
自主飞行状态意味着我们在起飞后→降落前不能通过电脑(或遥控器)再对飞机进行任何远程操作,所以编写程序要一步到位。
-
识别天井中的数字:
-
如何从图传传回来的视频流中识别天井中的数字呢?首先我们需要目标检测算法对图传视频画面进行实例分割,这样我们就能得到画面中的标靶部分。

图片来源:去年比赛提交的视频(地面端录制)那么目标检测算法从哪里来呢?
自己写一个开源好用的yolov5就是 -
那么目标检测算法从哪里来呢?
自己写一个yolov5就是一个开源又好用的目标检测(实例分割)算法我们新的 YOLOv5 release v7.0 实例分割模型是世界上最快和最准确的模型,击败所有当前 SOTA 基准。我们使它非常易于训练、验证和部署。更多细节请查看 发行说明 或访问我们的 YOLOv5 分割 Colab 笔记本 以快速入门。
——来自yolov5项目首页的介绍(readme.md)
-
在将标靶部分从视频帧中分离出来后,标靶的数字又该怎么识别呢?
自己写一个paddleocr就是一个开源又好用的ocr(Optical Character Recognition,光学字符识别)工具
-
-
在解决了以上问题后,我们现在已经可以获得标靶中的数字,我们将得到的三个数字比较一下,算出中位数,然后我们再通过捕获帧中中位数标靶的像素位置,通过与飞机传回的GPS位置做比对,计算得出中位数标靶的GPS位置(TODO)。
-
在计算出中位数标靶的GPS坐标后,我们就可以让飞机自动进入投弹模式,在去年的程序中,程序将会控制飞机取消正在进行的侦察mission,并生成一个包含中位数标靶的GPS坐标的投弹mission发送给飞机执行。
5.9 参赛选手可自由选择自动或手动的方式着陆。若选择自动方式着陆,在飞行器着陆且完全静止后方能拿起遥控器;若选择手动方式降落,在侦察与打击任务完成后方能拿起遥控器,操纵飞行器返航着陆。
- 自动着陆,新增加分项,参考PX4 User Guide中的land部分https://docs.px4.io/main/en/flight_modes/land.html#fixed-wing-fw
怎么去了解学习(具体途径)
yolov5
-
官方的简体中文文档。其中有详细的安装、推理、训练等教程

paddleocr
PX4 && mavsdk
-
PX4是一个飞控的系统,就好像你的电脑有windows、linux、mac系统,手机有Android、IOS系统,飞控也有一个开源系统叫PX4。
-
mavsdk是一个PX4的api,我们想要让飞行器实现自动飞行、自主完成任务、并且与自制的标靶识别功能完美融合,仅仅使用市面上的QGC等地面站软件是做不到的,但是不用QGC等地面站软件我们该怎么控制飞机呢?(你最好知道QGC是可以操控飞机完成一些自动飞行任务的😅)PX4的mavsdk就给我们创造了途径。那么mavsdk和px4有什么关系呢?在PX4 User Guide的Drone kit目录中就有说明。(想必大家都是熟读过PX4 User Guide的🤣)
不再推荐使用 DroneKit。
你应该改用MAVSDK (打开新窗口)使用 PX4,因为它几乎在所有方面都更好:功能、速度、编程语言支持、维护等。
可以在此处找到有关将 DroneKit 与 PX4 结合使用的文档:PX4 v1.12 > DroneKit (打开新窗口).我们打开MAVSDK的链接,来到MAVSDK的官网,可以看到MAVSDK的介绍
MAVSDK是各种编程语言的库集合,用于与MAVLink系统(如无人机、相机或地面系统)接口。
这些库提供了一个简单的 API,用于管理一个或多个车辆,提供对车辆信息和遥测的编程访问,以及对任务、移动和其他操作的控制。
这些库可以在无人机上的配套计算机上使用,也可以在地面上用于地面站或移动设备。
MAVSDK 是跨平台的:Linux、macOS、Windows、Android 和 iOS。
意思就是我们可以用它提供的api,通过python等编程语言,在pc上直接与飞控交互,用来控制飞行器、获取飞行器信息等。那么我们该怎么使用呢?
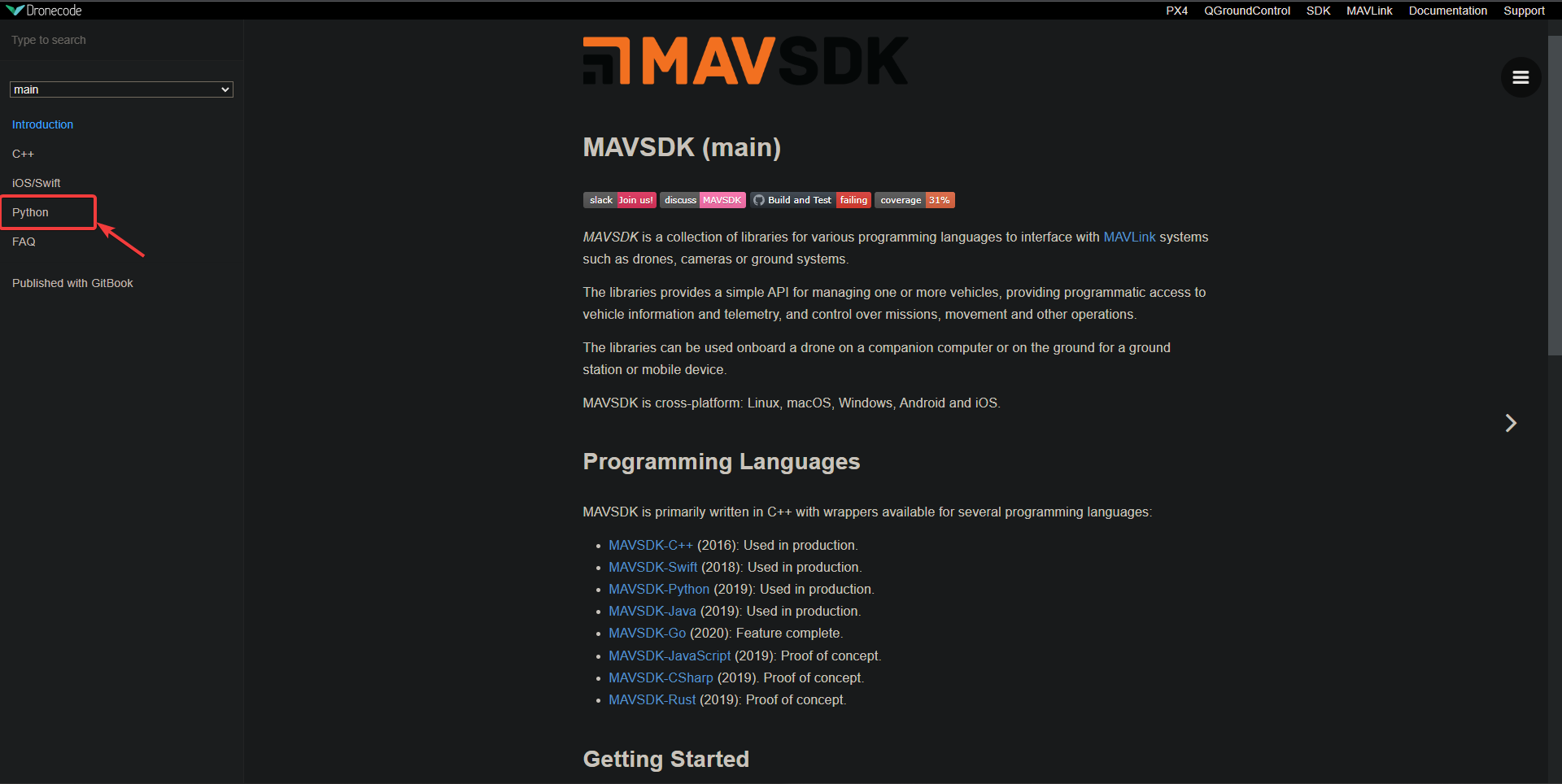
点击进入python的页面中,在这里有两个选项

点击第一个Python QuickStart我们可以进入Python QuickStart,里面有从安装到在模拟器运行、arm、takeoff、land的教程。如果你觉得示例不够多,https://github.com/mavlink/MAVSDK-Python/tree/main/examples里面有更多的官方示例。