【飞控】01_安装、接线、连接地面站
一. 安装、接线、连接地面站
*PX4官网UserGuide地址(**https://docs.px4.io/v1.12/en/**),强烈建议细读几遍*
接线
或者去年的比赛机(物理观察)
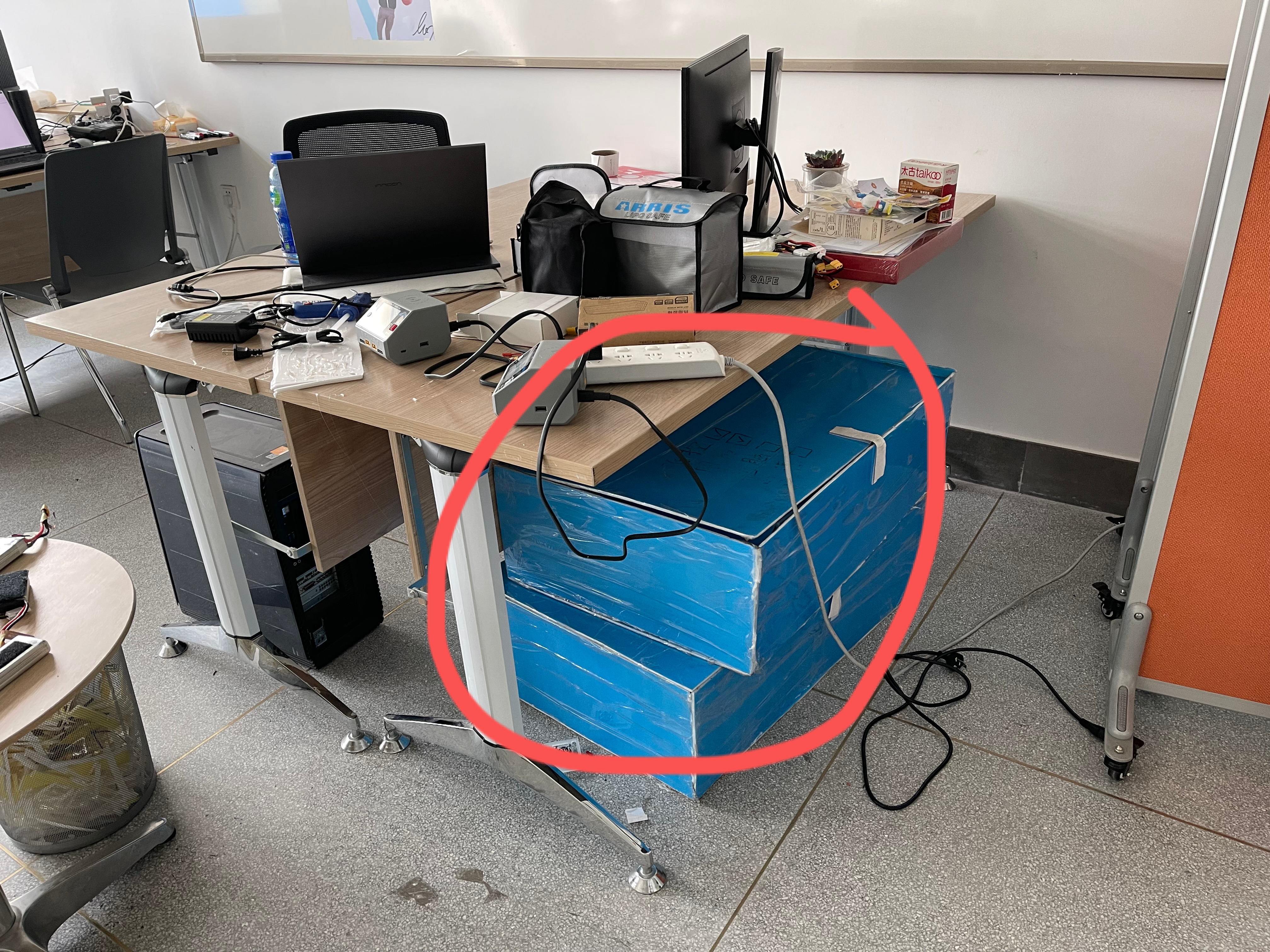

完成接线后,给飞行控制器(以下统称“飞控”)通电(使用3s锂电池或usb数据线),其大致情况应该如上图所示,飞控蓝灯闪烁、GPS蓝灯闪烁、数传绿灯慢闪(未连接),接下来可以连接地面站。
QGroundControl地面站(简称QGC)
-
PX4官方推荐地面站QGroundControl,下载安装对应你的操作系统的QGC。
-
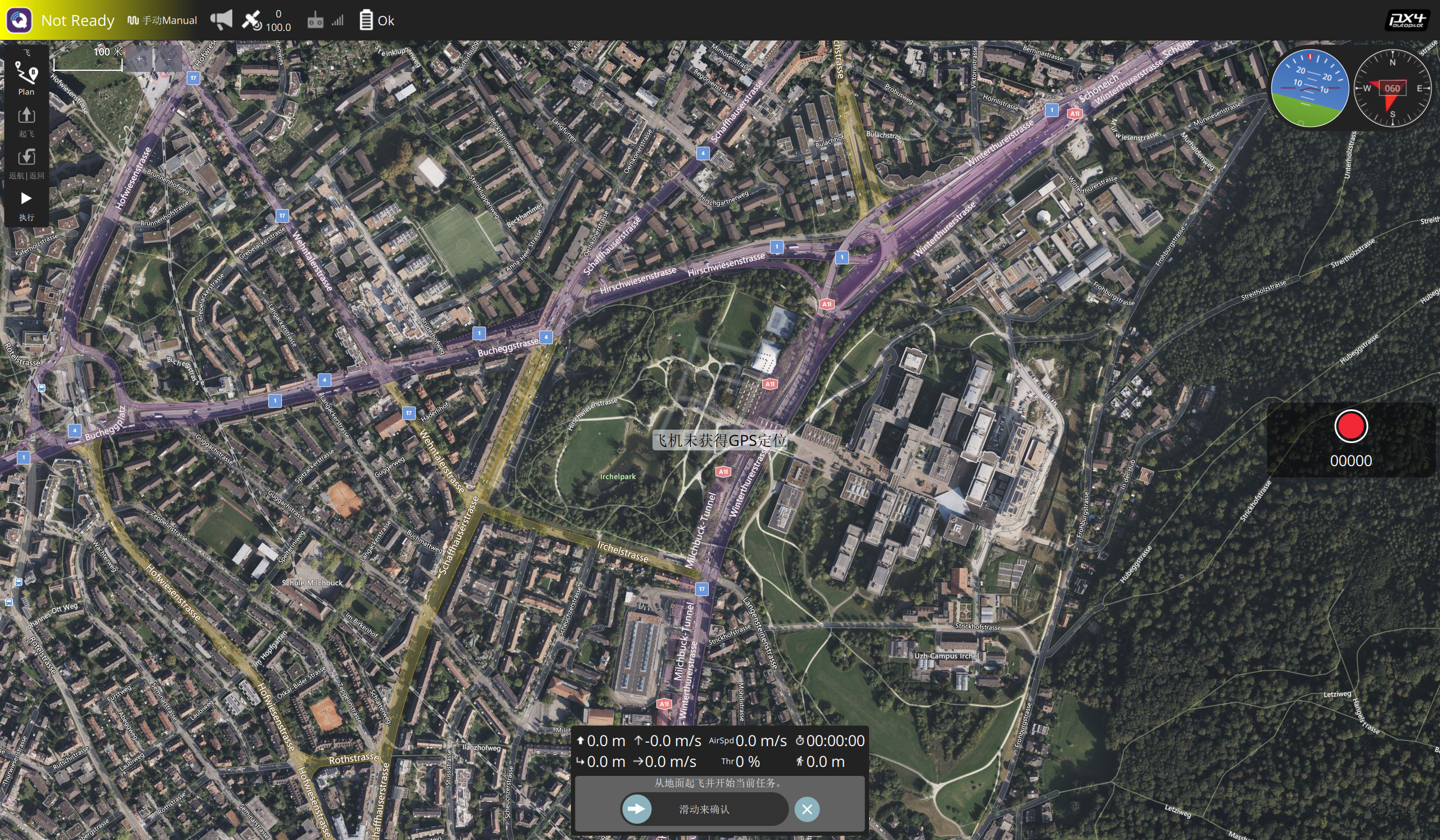
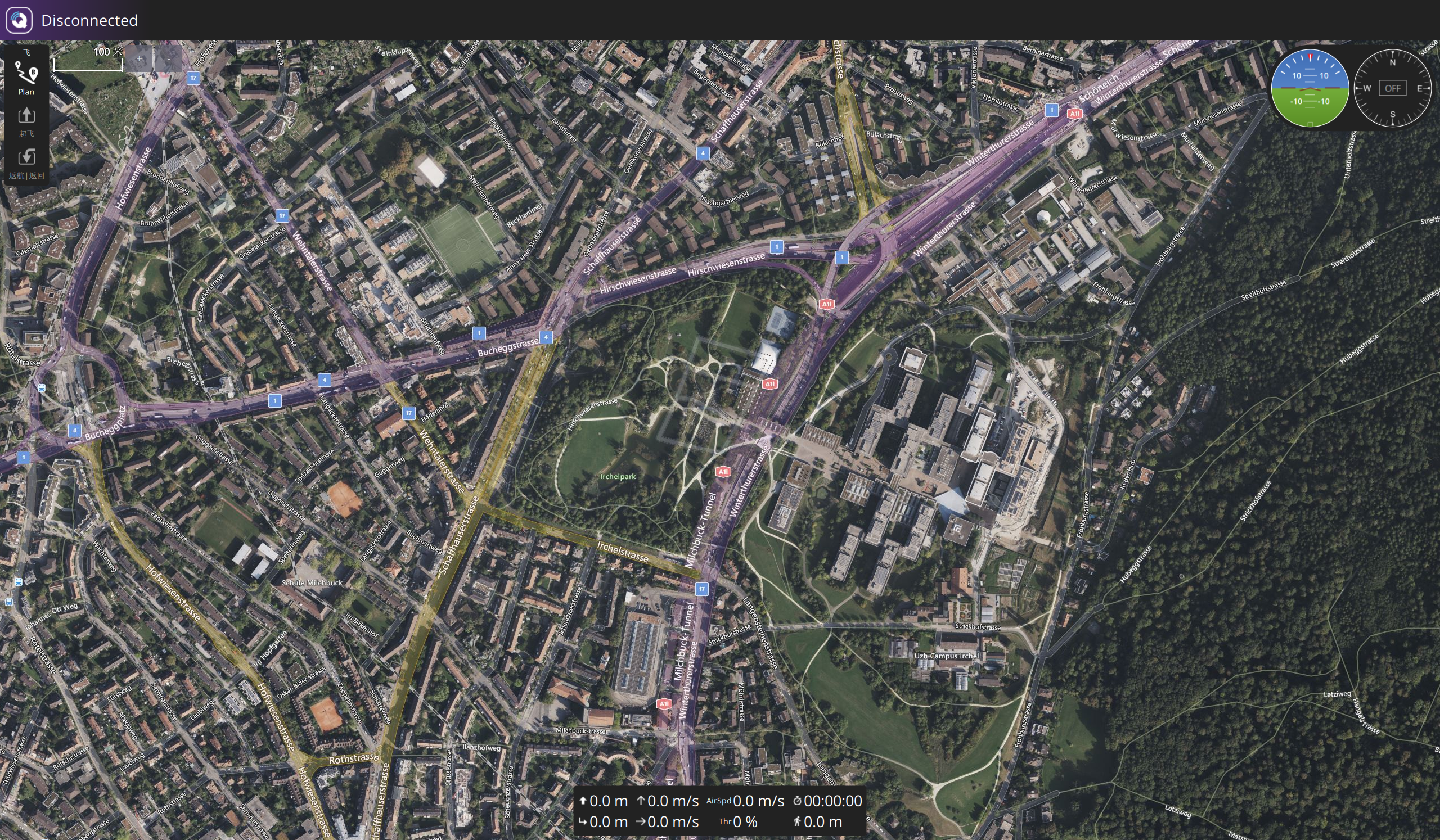
打开未连接飞机时如图
-
连接飞机后如图
-
-
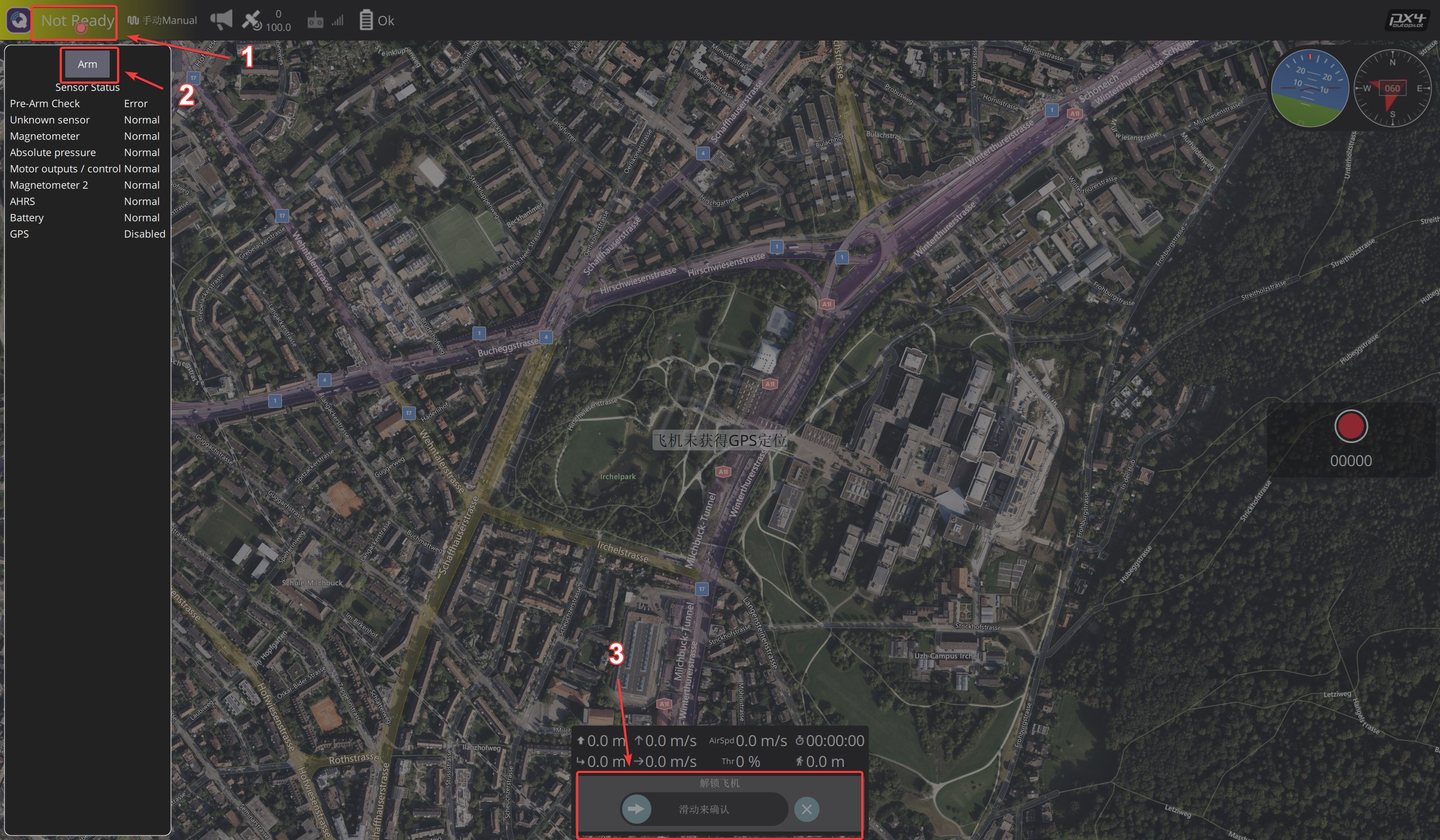
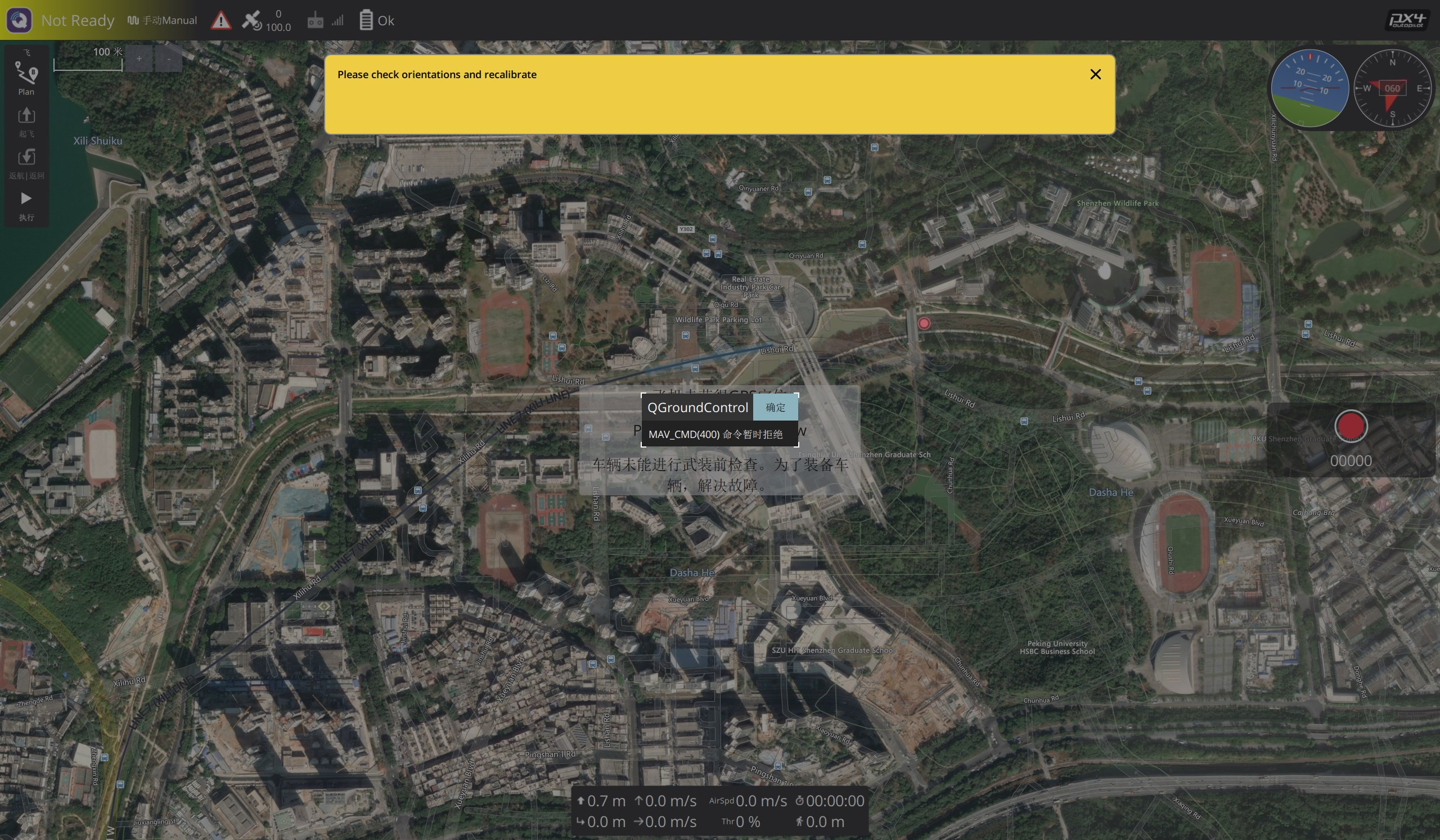
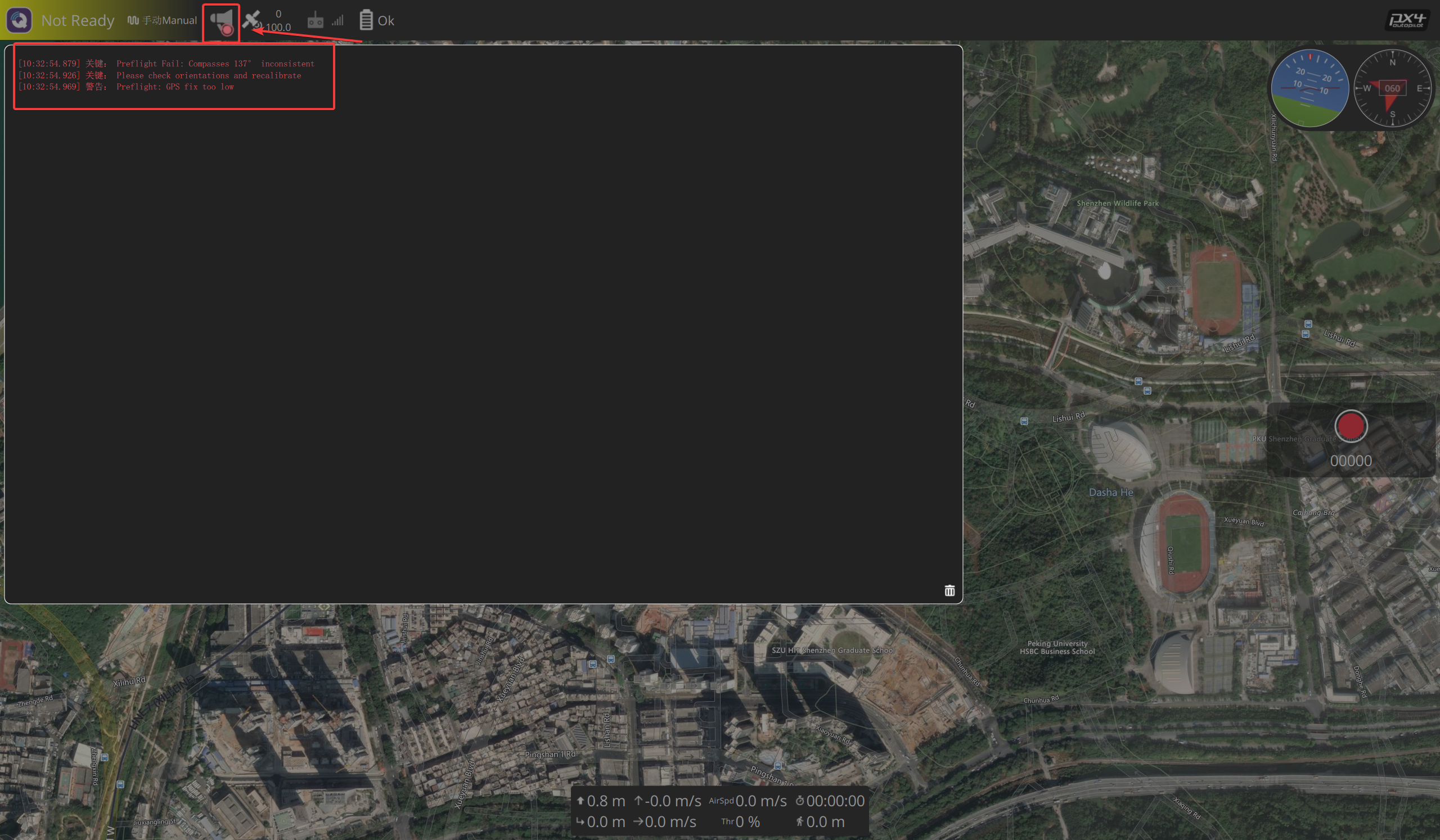
其中,左上角“Not Ready”代表飞行器现在的状态即未准备好,飞行器的状态按经验以及实操顺序可列为以下几种:
- Not Ready(黄色底色):飞行器未准备就绪,有的操作未完成(比如RC遥控器未连接、飞机姿态错误(未水平放置)、空速管故障、GPS未搜到星等),无法ARM飞机。如你所见GPS未搜到星被打上了删除线,这是因为评价飞机是否Ready的参数是你可以调的,熟读参数表的你想必已经找到了(https://docs.px4.io/v1.12/en/advanced_config/parameter_reference.html#commander)(影响是否Ready的参数不止这些,如果你遇到了某些参数设置了但是没有达到预想的效果,请自行Google)
- Ready To Fly(绿色底色):飞行器已准备就绪,可以ARM。在ARM前,舵机可能会通电保持固定姿态(与固件版本有关),电机可能在你最开始上电时进行自我检测,但是均不会收到任何输入信号,拨动RC遥控器飞机不会做出反应。
- Armed(绿色底色):飞行器已经ARM,此时所有舵面、电机均可通过飞行控制器控制,飞机可以对RC遥控器的信号做出响应。
- Manual(绿色底色):飞行器已经ARM,飞行模式为手动飞行模式,想必熟读PX4 User Guide的你对这些词并不陌生(PX4 Flight Modes Overview)。手动模式即没有自稳,RC信号直接控制飞机(在你所设置的pwm maxmimun minimun参数下)。
- Stabilized(绿色底色):飞行器已经ARM,飞行模式为自稳飞行模式,飞行器会自动稳定飞机,此时的体验更像打游戏()。
- Mission(绿色底色):飞行器已经ARM,飞行模式为任务飞行模式,飞行器会自动飞行前往设置的航点、航线,RC遥控器输入将不起作用,当任务结束后,飞行器默认会返回出发点上空100m盘旋(是否返回、盘旋高度、盘旋半径均可修改参数),如果飞手想要接管飞机,则需通过遥控器上的拨杆更改飞行模式到Manual或Stabilized,以结束Mission并夺回飞机控制权,当然,一般进行到这步不是结束就是结束了 : )
- Hold(绿色底色):飞行器已经ARM,飞行模式为保持飞行模式,飞行器会在当前位置上空盘旋,盘旋半径和高度可以通过参数自行设置。
- Lost Connection(红色底色):可能是这个名,造成这种状态有两种可能:
- 一是工作结束,收拾下班;
- 二是工作结束,收拾下班:
-
依次点击左上角文字部分->ARM->滑动来arm(解锁)飞机
-
-
-
如你所见Not Ready的情况下无法Arm飞机,具体原因也已给出(check orientations and recalibrate),这是因为我的gps是随便放置的,没有按照正常的安装方向向前摆放。更多and更详细的信息可以在这里看
-
-

本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 永世乐土!